Q: What is your forum nickname?
Hehe, guess once. 🙂
Q: How long have you been involved in FlightGear?
Almost since the beginning, actually. I first heard about the project in 1997, when I got an email from Curt Olson, in response to a posting on the usenet newsgroup rec.aviation.simulators.
Q: What are your major interests in FlightGear?
I like the open nature of the project and the possibility to contribute at various levels.
Q: What projects are you working on right now?
I am actually doing several different things for FlightGear. My main project is developing a fully integrated AI air traffic system that contains autonomous vehicles, an ATC system that interacts with both AI controlled aircraft and with the user controlled aircraft. In addition to that, I am one of the editors of the main website, editor of the FlightGear facebook page, involved in the release process, code committer, and organizer of the annual FlightGear booth at FSWeekend in Lelystad (EHLE). In addition, I have recently taken over the administrator role for taxidraw.
Q: What do you plan on doing in the future?
I don’t expect the AI system ever to be finished, so I’m fully concentrating my coding efforts on this project.
Q: Why is it that you are interested in flight simulation or aviation in general?
As a kid I was fascinated by space travel, the Apollo missions to the moon, etc, watching every program on TV, and reading every book I could lay my hands on. As a six-year old, I visited Schiphol (EHAM) airport for the first time, and that sparked my fascination for the big jet airliners. Kind of like every kid at one stage, I wanted to become a pilot. My real interest in aviation didn’t start until I was nearly 20 though, after visiting an airshow at Leeuwarden airforce base (EHLE). This was around the same time as when I got my first PC, a second hand 286DX, which I bought from a relative living in Germany, with a 40 Mb hard disk and 1 Mb of ram. It had a German version of Microsoft Flight Simulator 4.0 preinstalled. So, in addition to learning to “fly” I learned the German word for “crash” as well.
Q: Are you happy with the way the FlightGear project is going?
Yes absolutely. We are currently in the process of further improving our infrastructure, by setting up things like the release plan, formalizing the rules for commit access, aircraft maintenance, and we’re brainstorming about feature requirements for the long term. Firm ideas are present for modularization of the FlightGear code, and some ideas for an integrated launcher GUI have recently been coined in a very informal setting. It will certainly take quite some time before these plans are all realized, but I think that the project is more vital and alive as ever. I’m also just amazed at some of the recent developments, such as Frederic Bouvier’s project Rembrandt, Thorsten Renk’s, local weather system, or Martin Spott’s ongoing efforts to build a unified infrastructure for scenery generation.
Q: What do you enjoy most about contributing to FlightGear?
I think there are a number of aspects that I really enjoy. One of them is the collaboration with other people. Being part of the development team, we’re all pretty much equals, and regardless of one’s age, background, occupation, political or religious conviction, we all share something we like and like to collaborate on. That is really enjoyable. It may also happen that somebody just jumps in and finds a solution in no time for a problem that has been cracking my brain for ages. For example, Adrian Musceac, recent work on generating AI traffic patterns was really something amazing. Likewise, I enjoy the interaction with many other talented people, such as Brett Harrison, who’s just so amazing at making convincing liveries. Obviously there are many other talented people around whom I really enjoy working with and it’s a shame I can’t name them all. Secondly, I also really enjoy having the privilege of being the first to experience a new feature for the first time. I was the first person ever to see the sun and moon appear in a desktop Flight Simulator, and that is a little bit special.
Q: Are there any “hidden features” you have worked on in FlightGear that new users may miss?
Yes, my original contribution to FlightGear was some code to calculate the position of the Sun, Moon, and even the planets. Both the sun and moon are pretty much taken for granted now, but back then (in 1997) FlightGear was the first PC based simulator that actually had a physical rendering of the sun and moon! Nobody will probably even see the planets, but I got the code almost for free, once I figured out how to calculate the solar and lunar positions, so their a little bit of an Easter egg. After finishing the celestial code, and before starting the AI traffic system, I initiated many projects that I subsequently handed over to others. As such, I have extended the time calculation code to deal with local time, and to allow the user control over the time of day, and implemented the original graphical user interface (GUI) system, and the original 2D cloud layers.
Q: What advice can you give to new contributors who want to get started on their first aircraft/new feature/Nasal script?
Be optimistic, be naïve, be realistic, and start modestly. Set yourself an attainable goal! I should probably explain what I mean by this. When we started out, back in 1996-1997, we were what I would now describe as incredibly optimistic in the sense that we believed that we could pull this off, but we were also somewhat naïve in the sense that we really didn’t have any firm idea about the challenges that lay ahead. But, we were able to pull it off, so this shows that we were right after all. But, if you want to contribute don’t start with your magnum opus. Before starting out, take some time to familiarize yourself with the project, get to know the code base, data structure or workflow. In addition, making a good first impression helps. Over the years we’ve seen a tremendous amount of grand ideas and not many of them have materialized, so we’re naturally a little apprehensive you may not find an immediate warm welcome, but if you do come up with a well thought-out idea, you may convince the development team, especially if you can substantiate your ideas with some working code to back it up.
Q: Have you previously used other flight simulators or simulation software in general?
Well, as mentioned before, I started out with FS4, and have pretty much had every version since then, until FS2004. The latter version got me interested in the AI system. When I started playing with the FS2004 equivalent of the ATC system I and began to notice its programming flaws. Determined that I could do this better, I started drawing out my own plans, and since than, I haven’t really touched any other simulator.
Q: How does FlightGear compare in your opinion?
I like FlightGear better because it’s a platform that is constantly moving. I almost exclusively run the cutting edge development version, so occasionally you’re in for a little surprise. Be it positive or negative. But that keeps things a little exciting to me.
Q: Do you remember what first got you interested in FlightGear? How did you learn about FlightGear? In other words, why did you actually download and try FG?
Yeah, that’s a long story. I was reading the usenet rec.aviation.simulators quite frequently at the time, had been exploring Linux for a few years, and finished my C++ programming course at university. This was around 1997, so the Linux distros weren’t as advanced as they are these days, and you still had to do quite a lot yourselves. One particular afternoon, I came across a usenet posting, which read “OPEN LETTER TO ALL FLIGHTSIMULATOR DEVELOPERS”. This was around the time that Microsoft FS97 was the latest version, and many users were dissatisfied. The original poster wanted to write a letter, on behalf of every dissatisfied user, to ask for a better version, asking the big game companies to incorporate their wish list. I responded to the thread, stating that if we really wanted a sim of our own, we should probably do it ourselves. I remember being a little anxious, because I wasn’t sure whether I would actually be able to substantiate that claim, if we were to follow it up. So, a few days later, I was actually a little apprehensive when I opened up my mailbox and found an email from a guy named Curt Olson, inviting me to have a look at, what would eventually become the flightgear.org website. Well, the rest is history I guess…
Q: What was your first impression about FlightGear?
That’s a really interesting question, because there was no FlightGear so to speak of. When I joined, Curt had hacked together a few proof-of-principle demos; the one I downloaded was called linux-demo-0.0.7.tar.gz, if I recall correctly, and it consisted of a small sample of elevation data from a chuck of terrain near Arizona, source code of a primitve (by today’s standards) OpenGL based viewer, a copy of Bruce Jackson’s larcsim FDM, and a simple keyboard interface. But it was exciting to get it to compile, and run!
Q: Compared to other flight simulation software, what are FlightGear’s major benefits in your opinion?
It’s scalability, open architecture, and the fact that it can be a great test bed for ideas, as well as the fact that there is no need for third party add-ons. By bringing every suitable user contribution into a single repository, we essentially create our own add-ons, and in the long run that should remove the burden from the end user to search for extensions.
Q: Do you think it is necessary to know how to program in order to contribute to FlightGear?
No way. In fact it never really has been a requirement, even in the old days when there was a lot more emphasis on C++ development, we already had a need for non-coding developers. Think about documentation writers, etc. These days, the balance is actually really shifting away from programming to artwork. The FlightGear world is essentially still largely an empty place, so we really have a need for high-quality buildings. Many of the exciting developments going on right now are in the development of new scenery textures, 3D modeling, and livery painting. These are actually skills that I essentially lack, so I have a lot of respect for the people working in these areas.
Q: Have you ever used FlightGear professionally or for educational purposes?
I once tried in my previous job, but the computer we bought for the project had serious overheating issues, so the project never really came off the ground. In the mean time, I found a different job, so the project was shelved.
Q: What about FlightGear as a “game”, do you think it can be used as such?
Probably, I like to use FlightGear purely for fun, so usually I just make up my own challenges, such as performing a bad weather landing, taking off and landing on an aircraft carrier, or playing with my latest AI/ATC code. Once finished, the ATC code will add a little bit of a game element, because it will expect you to fly specific routes, arrive at specific locations at a specific time, so as not to clash with other traffic etc etc. The system isn’t finished yet, but with some hacking I did quite recently manage to complete a traffic circuit under guidance of the ATC system, and it’s quite tricky to do right. So, there are some “gamey” aspects of FlightGear that are quite realistic and hopefully challenging. Having said that, I see absolutely no need for any formal gaming rules, or game like features such as setting off explosives and the like. Like many of the other developers, I like to keep FlightGear civil(ized). I don’t object to simulating military aviation though, as long as it doesn’t serve the purpose of glorifying death and destruction.
Q: On average, how much time do you spend working with/contributing to FlightGear?
Hard to say, it varies quite a bit with my day job requirements, but I think on average maybe one or two hours a day.
Q: Which of the more recent FlightGear developments do you consider most interesting/appealing?
There are quite a few. Of the individual projects, I really think that project Rembrandt (Frederic Bouvier’s shadow rendering code) is really exciting. But so is the new effort to unify all the shaders, the atmospheric haze and scattering, and Thorsten Renk’s local weather. I’m also quite happy with the progress we made with the AI traffic/ATC system, even though it’s not finished yet. But, what I think is perhaps even more exciting are some of the long-term infrastructural changes we have recently discussed. I can’t say too much about that yet, because many of the ideas haven’t been formalized yet, but making FlightGear more modularized by making use of HLA technology, and perhaps a more integrated GUI and launcher program are some of the exciting developments that I can see happening in a few years from now.
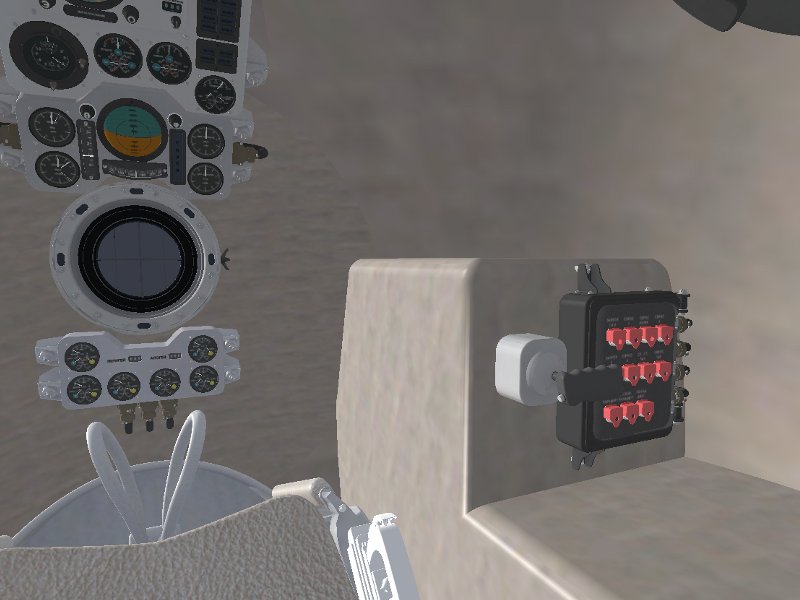
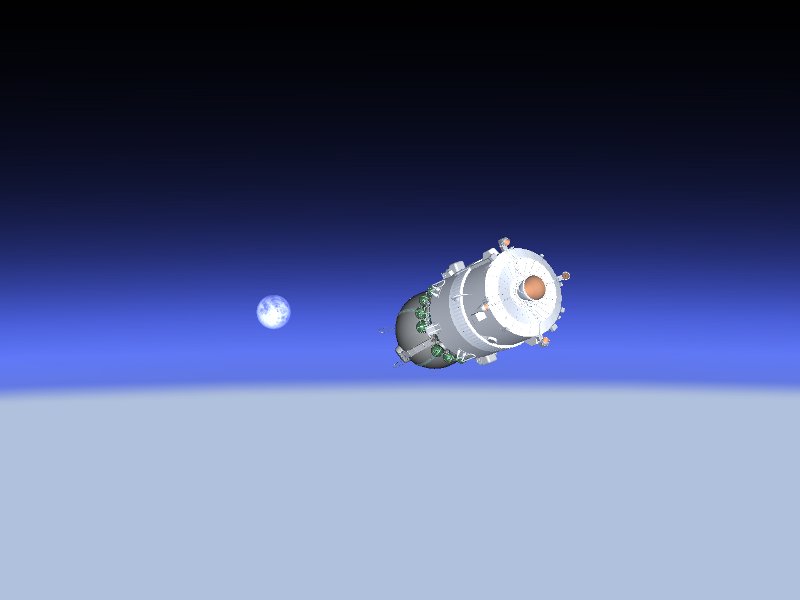
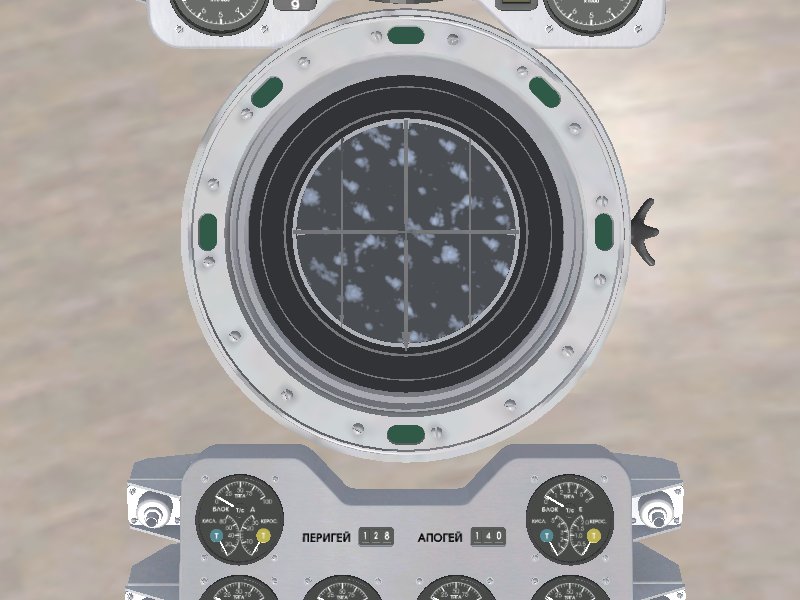
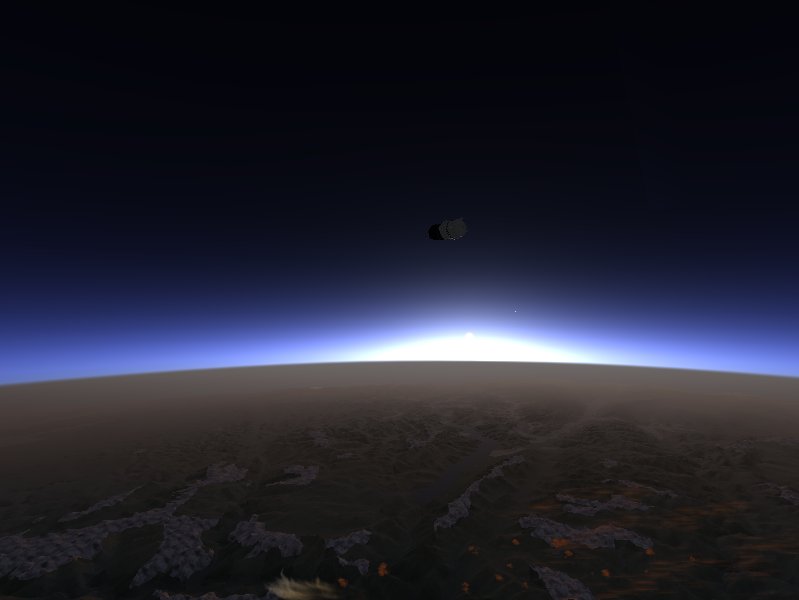
Q: Is there some feature that you’d truly like to see in FlightGear one day?
Yeah, there are some. Obviously, I’d like to see my own project come to it’s full potential, but in addition to that, I would like to see full scenery development of the polar regions of our planet. One year ago I visited Antarctica in real life, and this is just a very exciting area for flying. I’d also like to see the possibility of lower earth orbital space flight, more seamless terrain textures.
Q: What do you think could be done to attract even more new users and contributors to FlightGear?
Establish a good balance between developing new stuff and doing some public relations work. For the project the key question for survival is not to attract many users, but to attract potential contributors. Obviously, the way to do this is to attract many users, and to hope that there will be a few potential contributors among them.
Q: What about interacting with the FlightGear community? Any tips/experiences you’d like to share?
Nothing really special; just use your everyday courtesy, and keep realizing that we’re all volunteers. I’m usually not that active on the forum or mailing list, but I can tell from 15 years of experience that an intelligent and reasonable response is far more likely to create some momentum than a hurried response that is written in a spur of emotion. Also, I have observed that there is hardly any relation between action and words on either the mailing list or the forum. So when your new to the community, just hang around, get to know the characters and try to establish whom you can trust to be a knowledgeable source of information and who just raises a lot of dust.
Q: Have you ever recommended FlightGear to other users, friends/family?
Not really, my friends and family aren’t really into flight simulation.
Q: Is there anything else you’d like to share with us?
Yeah, have a lot of fun, and if you can try to contribute something to the project.